|
|

|
|
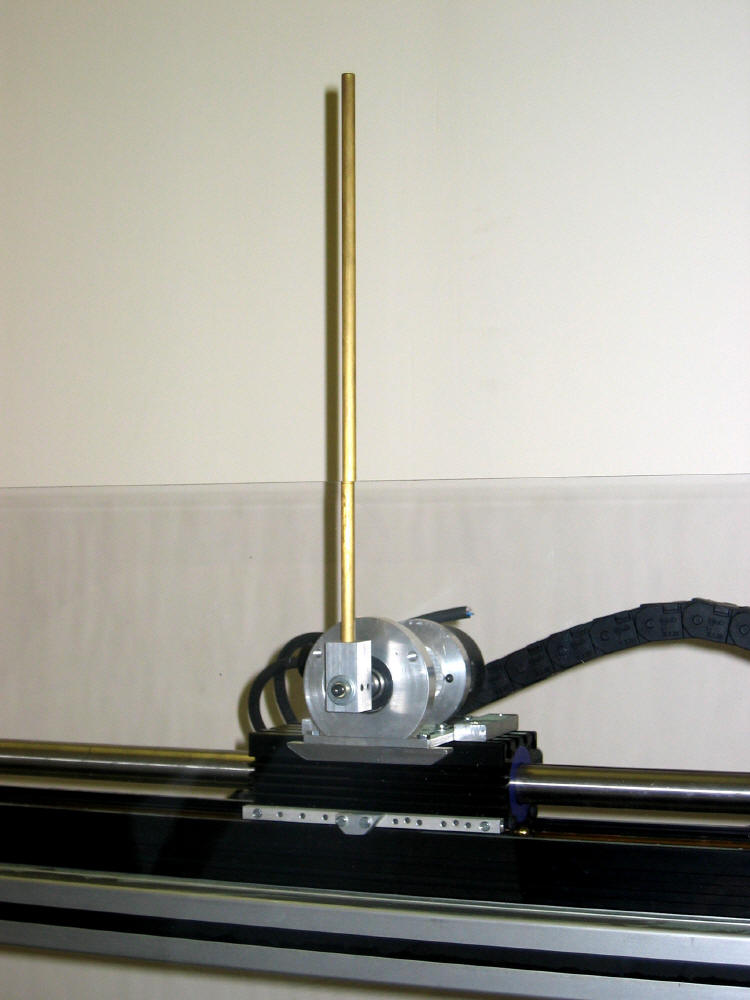
Pendule inverse, démonstrateur de commande non linéaire, projet RoboCoop, Région Nord Pas de Calais.
360 degrés, commande par moteur linéaire et carte D-Space. |
|

|
|
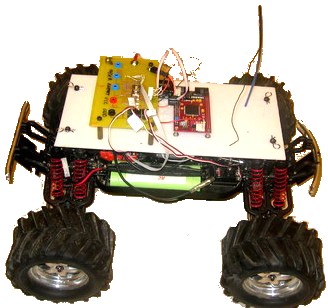
Robot d'extérieur
développé au LIRMM pour l'EPML68, projet RTT (LAGIS-CRAN-LIRMM-CNRS) |
|

|
|
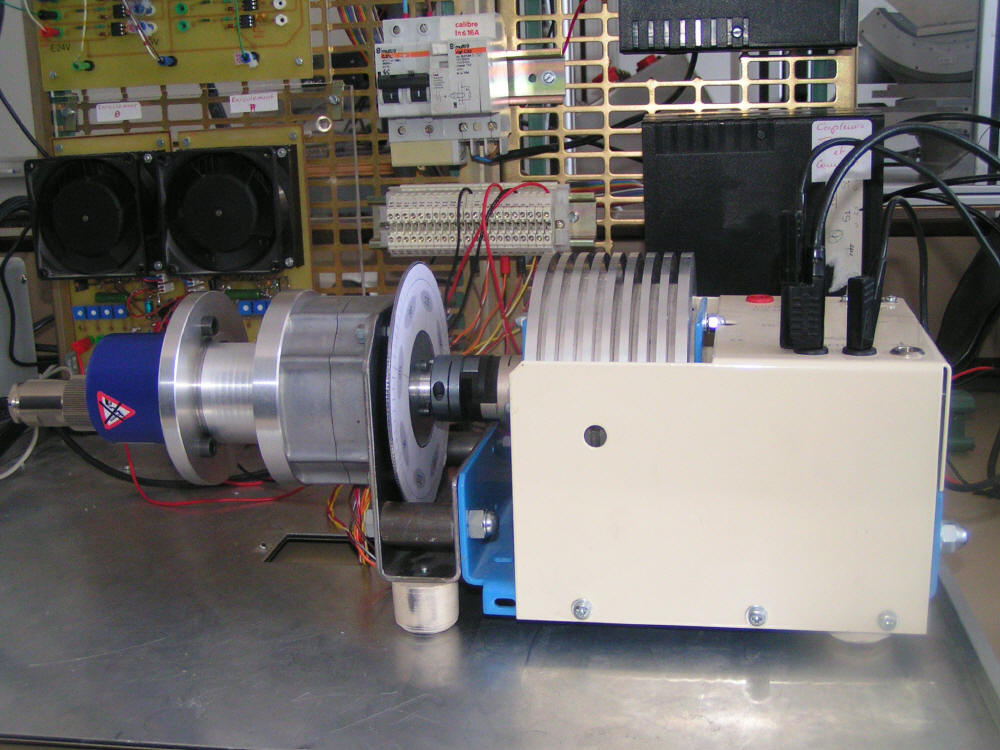
Moteur pas-à-pas (stepper motor)
commande non linéaire développée pour le projet TRACTION, CPER Région Nord Pas de Calais |
|

|
|
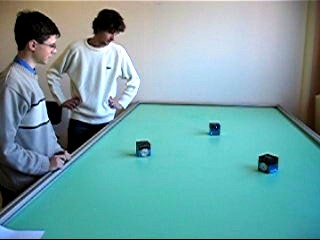
Robots Miabot, démonstrateur du projet RoboCoop, Région Nord Pas de Calais
Collaboration pour le maintien de formation (commande wifi, retour vidéo) |
|

|
|
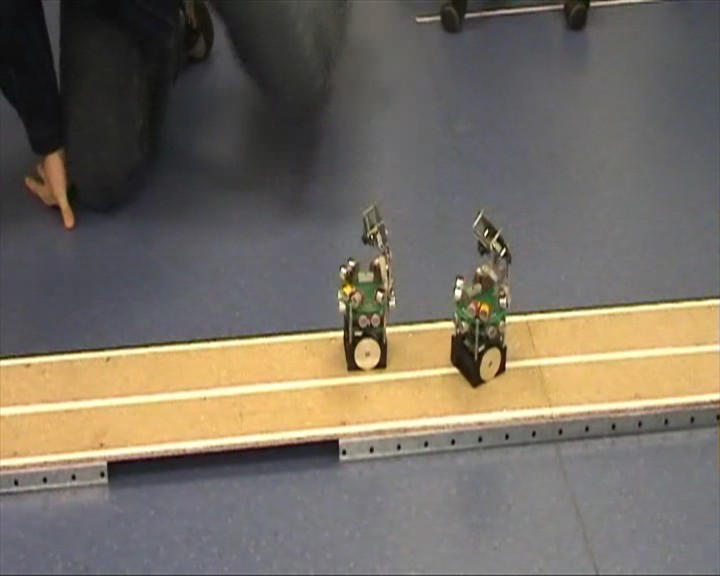
Robots Miabot en autoroute
Simulation d'une situation de dépassement, contrôle en boucle ouverte. Réalisé en 2008 par des élèves ISEN 2e année. |
|

|
|
Catapulte du bâtiment B20 de l'ONERA Lille.
Identification de modèles aérodynamiques (thèse de F. Veysset, 2006) |
|

|
|
Plate-forme TRAVEL du LAGIS (Polytech'Lille)
Robots mobiles RobuCar |
|

|
|
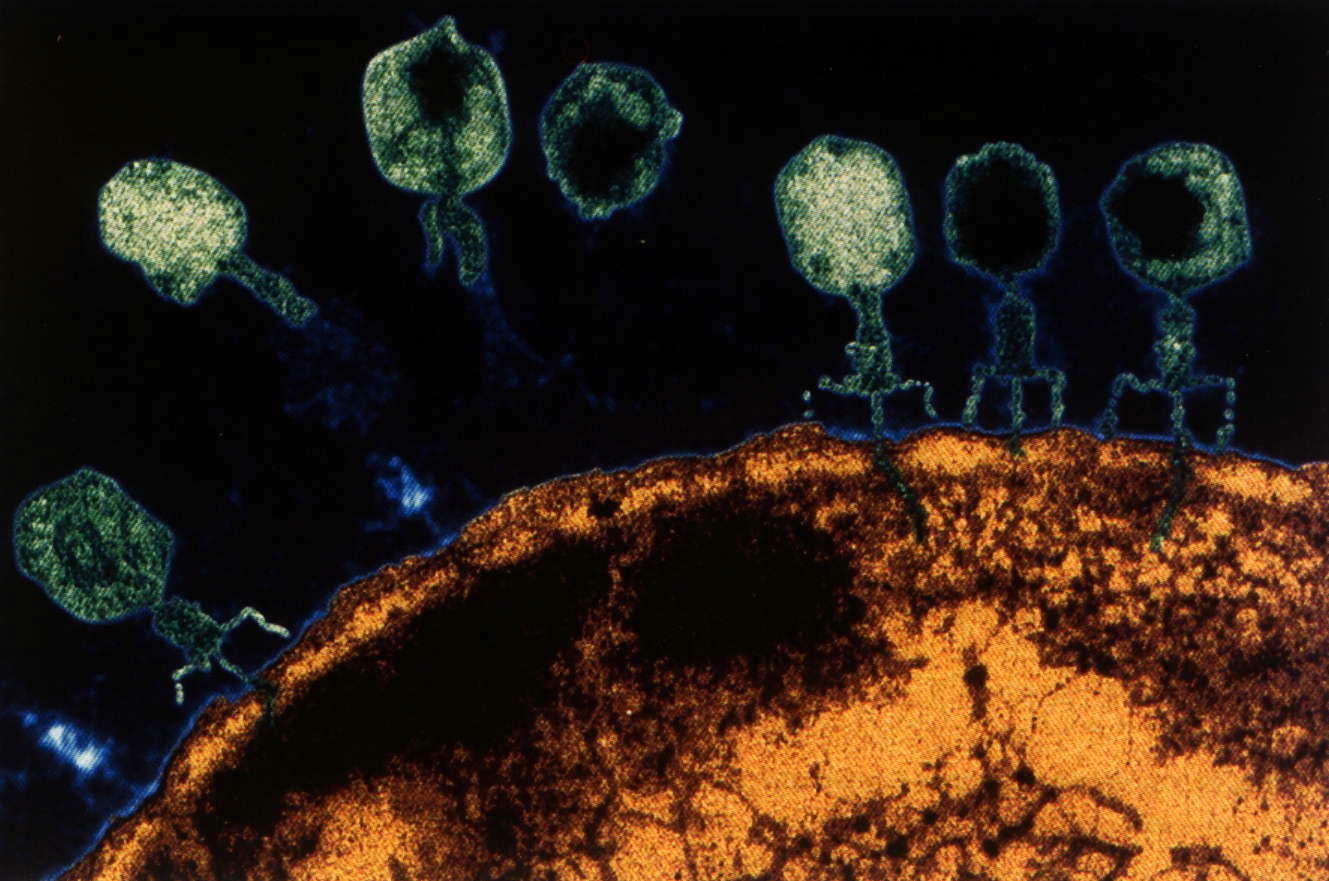
Co-évolution phages-bactéries.
Modélisation de systèmes complexes par méta-dynamiques (thèse de Marc Baguelin, 2003) |
|
|
|

|
|
Robot Pekee.
Cartographie par GVG (generalized Voronoï graph): projet FLOTIL 03-05 (EC Lille). |
|

|
|
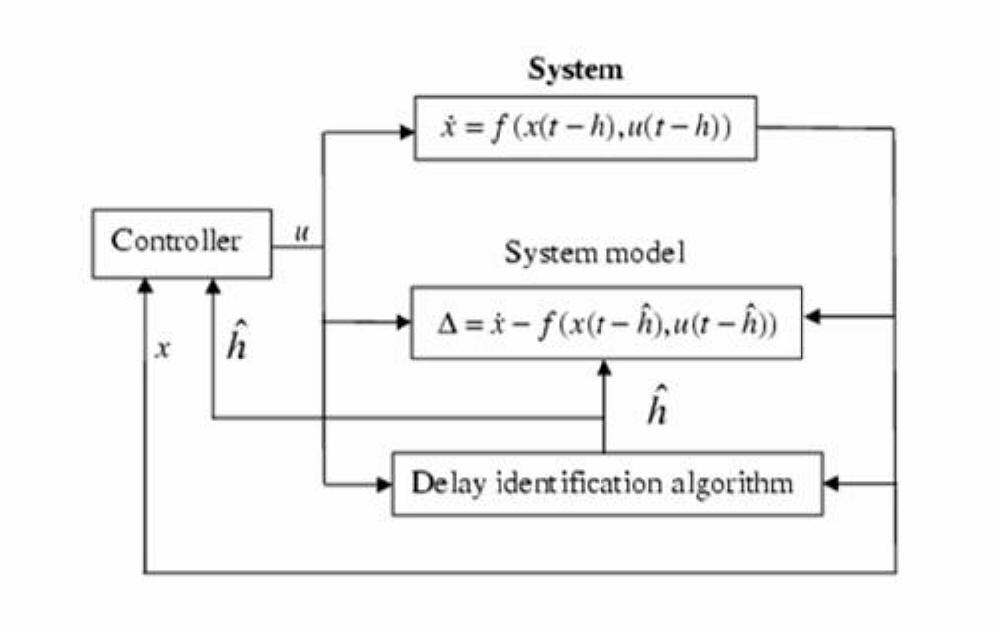
Identification de retards.
Algorithmes grands gains jusqu'en 2006, algorithmes ALIEN depuis. |
|

|
|
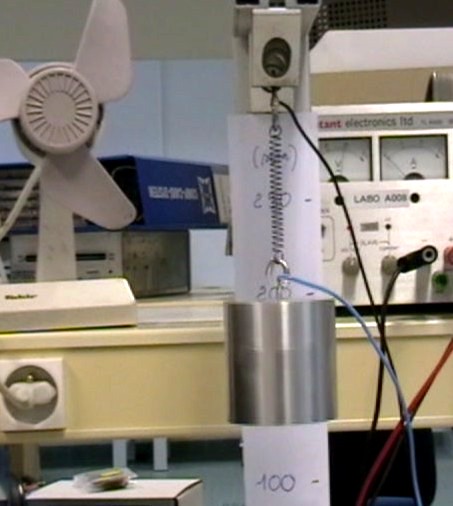
Pallier magnétique actif, 3 DDL.
Positionnement au micromètre, commande et estimation non linéaires. Collaboration T.U. Dresden |
|

|
|
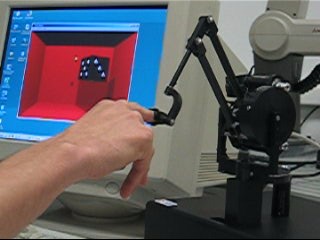
Système haptique pour la réalité vituelle.
Ce robot Phantom permet de reproduire des sensations (retour d'effort) conformes à la géométire d'une image synthétique. |
|

|
|
Robots manipulateurs coopératifs.
Démonstrateur en cours de développement pour le projet RoboCoop. Ces deux robots Mitsubishi devront manipuler un même objet de façon autonome et collaborative. |
|

|
|
Robots manipulateurs pour l'usinage (ENSAM Lille)
Usiner avec un robot manipulateur serait une économie importante. Une des applications auxquelles s'intéresse le projet ALIEN INRIA. |
|

|
|
"Smartuators" développés à l'ENIBrest : www.smartuator.org
La commande sans modèle, développée dans le cadre du projet ALIEN, permet d'améliorer le contrôle de nouveaux actionneurs basés sur des matériaux à mémoire de forme (Shape Memory Actuactors, Smart+Actuator = smartuator). |
|

|
|
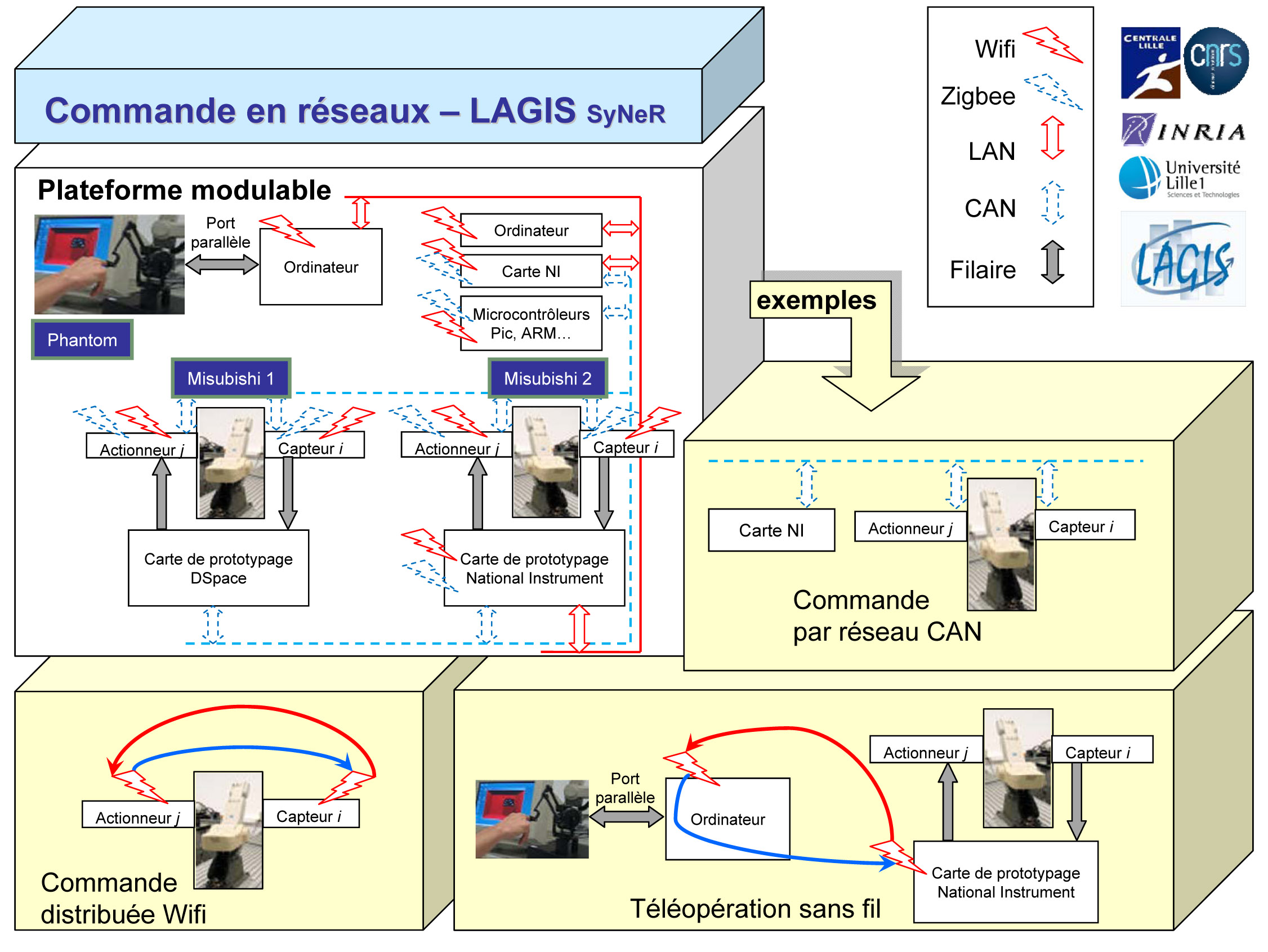
NCS : validation de systèmes commandés en réseaux (2010)
La flexibilité de cette plate-forme permettra de tester une bonne variété de réseaux (CAN, LAN, Wifi, Zigbee) pour faire communiquer différentes cartes de contrôle et différents processus (bras à retour d'effort, robots manipulateurs, pendules inverses, palier magnétique actif, moteur pas à pas...). |
|
|
|

|
|
Robot City, EuraTechnologie Lille 2011
Robot City est conçue comme un jeu : en réalité, c'est aussi une plate-forme de robotique collaborative, fruit des travaux de l'équipe Robotique de Service de l'ISEN Lille et de l'équipe Non-A de l'INRIA. Située sur le plateau INRIA de Euratechnologie, la plate-forme est accessible au public. |
|

|
|
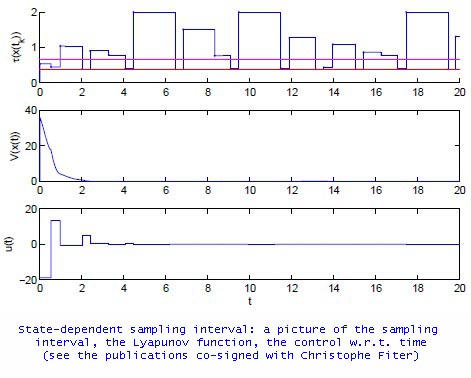
Echantillonnage à cadence variable, 2011
Dans le cadre des travaux de thèse de Christophe Fiter, nous étudions la synthèse d'échantillonage à cadence variable selon la valeur de l'état. Ceci permet de réduire la charge des processus en contrôle temps-réel. Travail commun avec Laurentiu Hetl et Wilfrid Perruquetti. |
|

|
|
Téléopération en réseau non dédié, 2012
Dans le cadre de la thèse de Bo Zhang, nous avons conçu et implanté des lois de commande robustes et performantes permettant la téléopération bilatérale à travers des réseaux non dédiés (Internet, Wifi...). Ces lois sont validées en présence de retards asymétriques et rapidement variables grâce à des approches de type Lyapunov-Krasovskii et H_infini. |
|
|
|
SLAM collaboratif et suivi de trajectoire, Innorobo 2014
Dans le cadre du projet Inria Non-A et de l'InterReg Sysiass, nous avons développé des algorithmes de localisation, cartographie et suivi de trajectoire pour des flotilles de robots autonomes. L'ensemble est programmé sous ROS, ce qui permet un transfert facile sur tous types de robots mobiles. Résultats présentés au salon Innorobo de Lyon en mars 2014. Photo: © Inria G. Scagnelli |
|
|